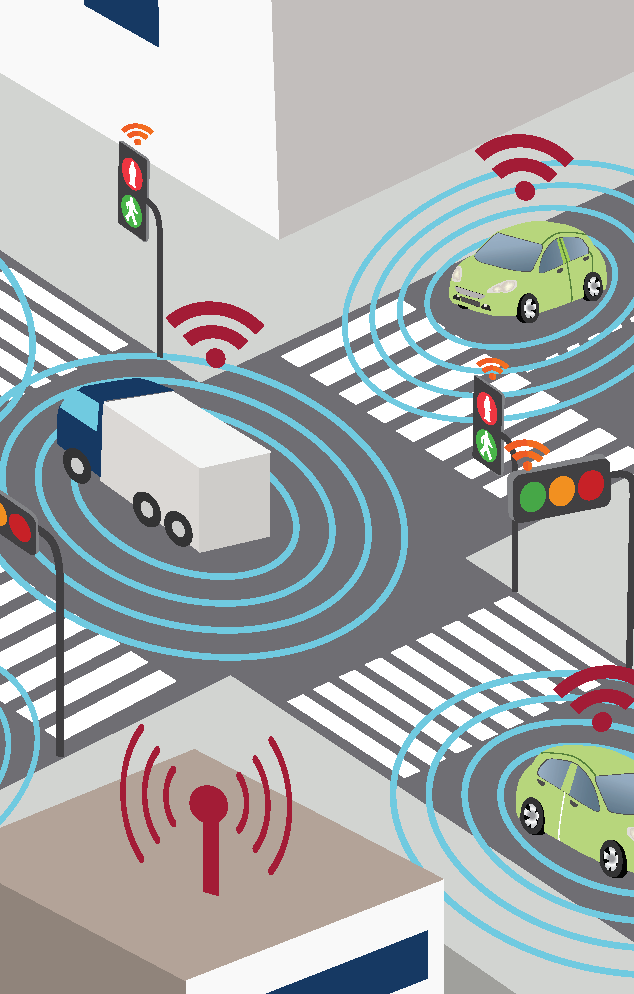
There are many simulation-based studies of traffic, however, there are few experimental results. This project bridges the divide by reducing the cost, effort, and risk. The project will enable the connected and automated vehicle (CAV) community to (a) rapidly prototype and study levels of connectivity between CAVs and human-driven vehicles, and (b) evaluate coordinated CAVs algorithms to modulate traffic flows.
DIF Role
The project developed a scaled robotic test-bed for connected and automated vehicles. The DIF project laid the foundation for an NSF Award.
Temple Faculties

Associate Professor
Temple University
DIF Consultant
Philip Cameron
Mechanical Engineering
Nissan Gelb
Mechanical Engineering
Chad Martin
Electrical Engineering
Von Kaukeano
Electrical Engineering
Thomas Painadath
Electrical Engineering
Nelson Chan
Mechanical Engineering
Natalie Walker
Mechanical Engineering
DIF Awards
Philip Cameron, Digital Innovation Foundry Scholarship
Nissan Gelb, Digital Innovation Foundry Scholarship
Chad Martin, Digital Innovation Foundry Scholarship
Von Kaukeano, Digital Innovation Foundry Scholarship
Thomas Painadath, Niraj & Cara Patel Endowed Scholarship
Nelson Chan, Fadem Endowed Scholarship
Natalie Walker, Persson-Barbour Endowed Scholarship